Écrire l'algorithme du suivi d'une ligne noire
Méthode :
A partir du synoptique, vous devez expliquer les actions du robot et la détection des capteurs dans les différentes situations en complétant le document :
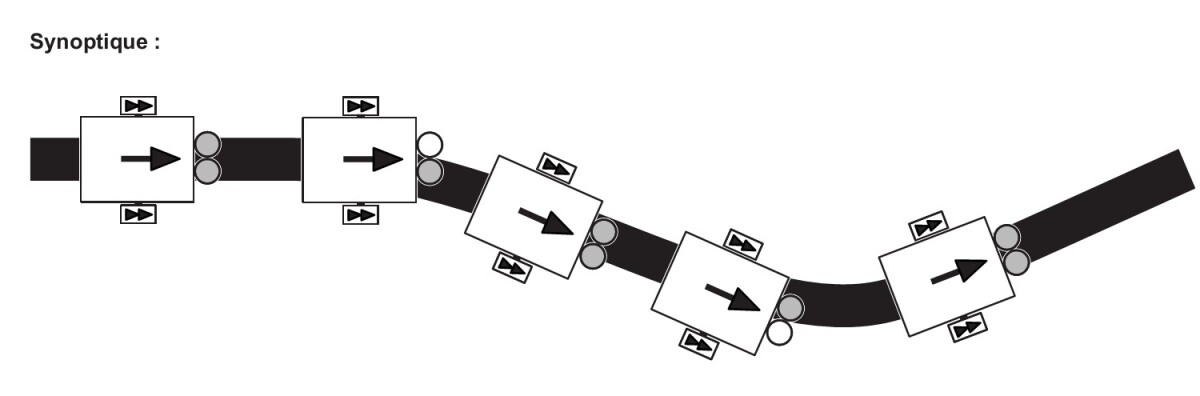
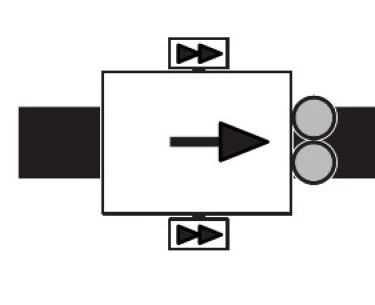
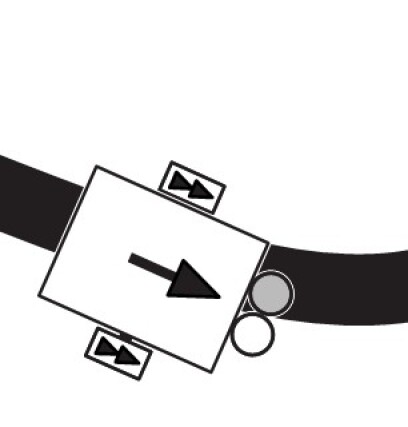
Situation 1 :
Quelles sont les actions sur le moteur droit et sur le moteur gauche ?
Quelle est la couleur détectée par les capteurs droit et gauche ?
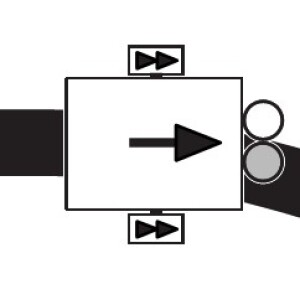
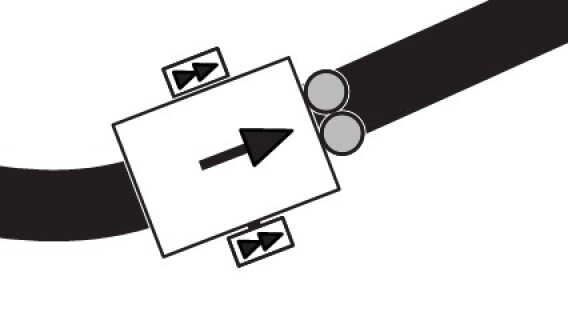
Situation 2 :
Quelles sont les actions sur le moteur droit et sur le moteur gauche ?
Quelle est la couleur détectée par les capteurs droit et gauche ?
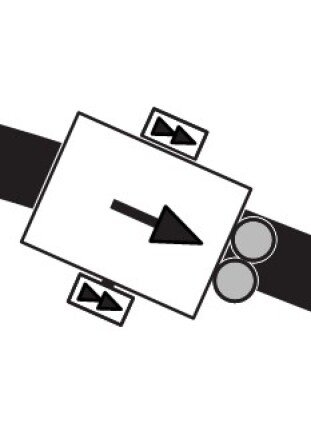
Situation 3 :
Quelles sont les actions sur le moteur droit et sur le moteur gauche ?
Quelle est la couleur détectée par les capteurs droit et gauche ?
Situation 4 :
Quelles sont les actions sur le moteur droit et sur le moteur gauche ?
Quelle est la couleur détectée par les capteurs droit et gauche ?
Situation 5 :
Quelles sont les actions sur le moteur droit et sur le moteur gauche ?
Quelle est la couleur détectée par les capteurs droit et gauche ?
La structure alternative "si alors"

La condition "si alors" permet de tester une condition avant de faire une action.
Pour le robot, on pourra commander une action des moteurs suivant l'état de capteur optique infrarouge :
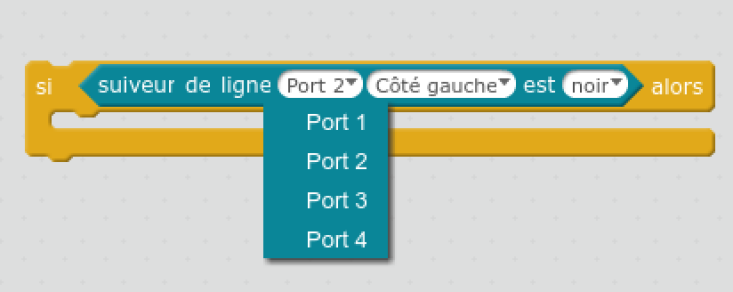
Il faudra sélectionner le port sur le quel est branché le capteur (normalement le port 2)
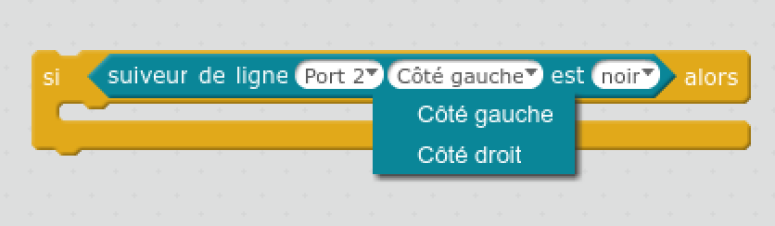
Il faudra sélectionner le coté droit ou gauche du capteur à tester
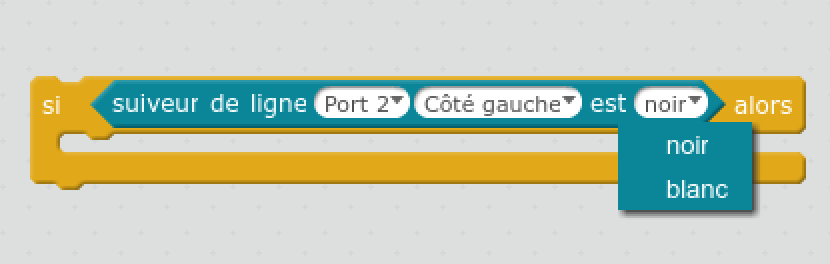
Ensuite il faudra choisir l'état du capteur (détection du noir ou du blanc)
Complément : Algorithme de deux conditions "si alors"
Dans le cas de deux conditions alternatives "si alors et si alors", il est possible d'imbriquer deux structures alternatives "si alors"
