Réalisation d'une poursuite de robots
En associant convenablement le programme de suivi de ligne et le programme de détection des obstacles, vous devez réaliser un programme qui permette le suivi de la ligne et de ralentir ou d'arrêter les robots afin d'éviter les collisions.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
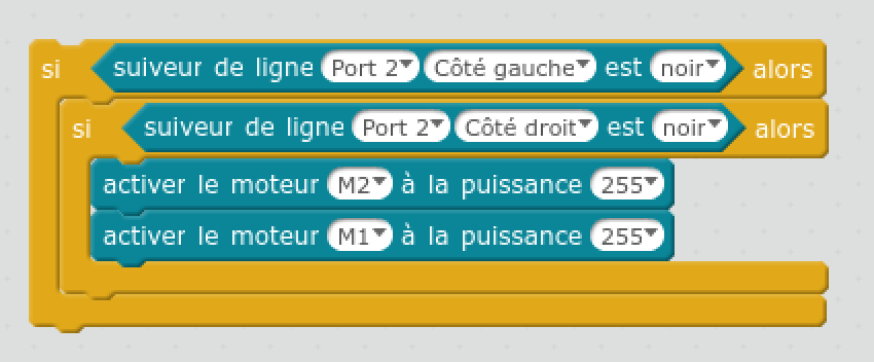
Situation 1 : le robot se trouve sur la ligne
Si le capteur de ligne gauche détecte la couleur noire
Et si le capteur de ligne droit détecte la couleur noire
Alors il faut activer le moteur droit et le moteur gauche
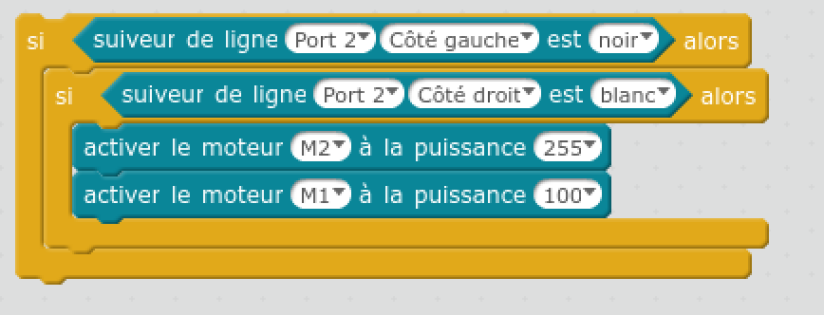
Situation 2 : le robot se trouve à gauche de la ligne
Si le capteur de ligne gauche détecte la couleur blanche
Et si le capteur de ligne droit détecte la couleur noire
Alors il faut activer le moteur gauche
et ralentir ou arrêter le moteur droit
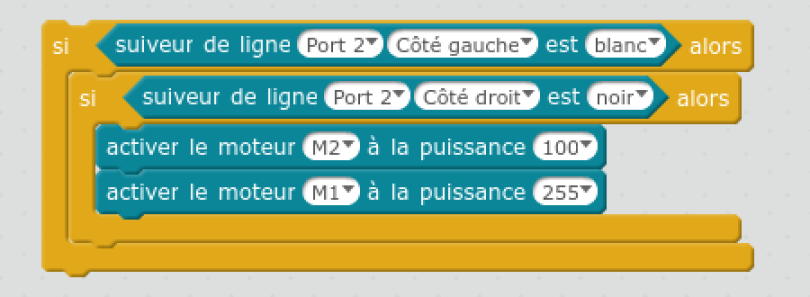
Situation 3 : le robot se trouve à droite de la ligne
Si le capteur de ligne gauche détecte la couleur noire
Et si le capteur de ligne droit détecte la couleur blanche
Alors il faut activer le moteur droit
et ralentir ou arrêter le moteur gauche
Mise en place des situations avec le détecteur de distance
Si la distance mesurée par le détecteur ultrasons est supérieure à 13 cm le robot doit suivre la ligne avec les 3 situations
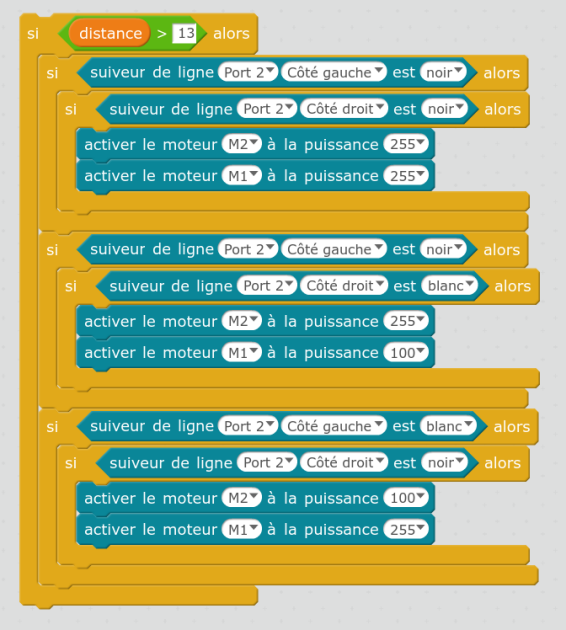
Si la distance mesurée par le détecteur ultrasons est inférieure à 13 cm le robot doit s'arrêter.
Mais si le robot n'est plus sur la ligne alors le robot doit reculer.

Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.