Simuler la mise en place des pattes sur le robot
Méthode : Simuler la mise en place des pattes sur le robot
La solution la plus simple est d'ouvrir le fichier ci-dessous avec les plaques modèles situées correctement sur le robot.
Sélectionner une des plaques modèles .
Faire un clic droit et choisir "recharger".
Choisir "oui" pour remplacer le composant par celui que vous venez de réaliser.
Le logiciel remplace les deux plaques par les pattes du support que vous venez de créer placées correctement sur le robot.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
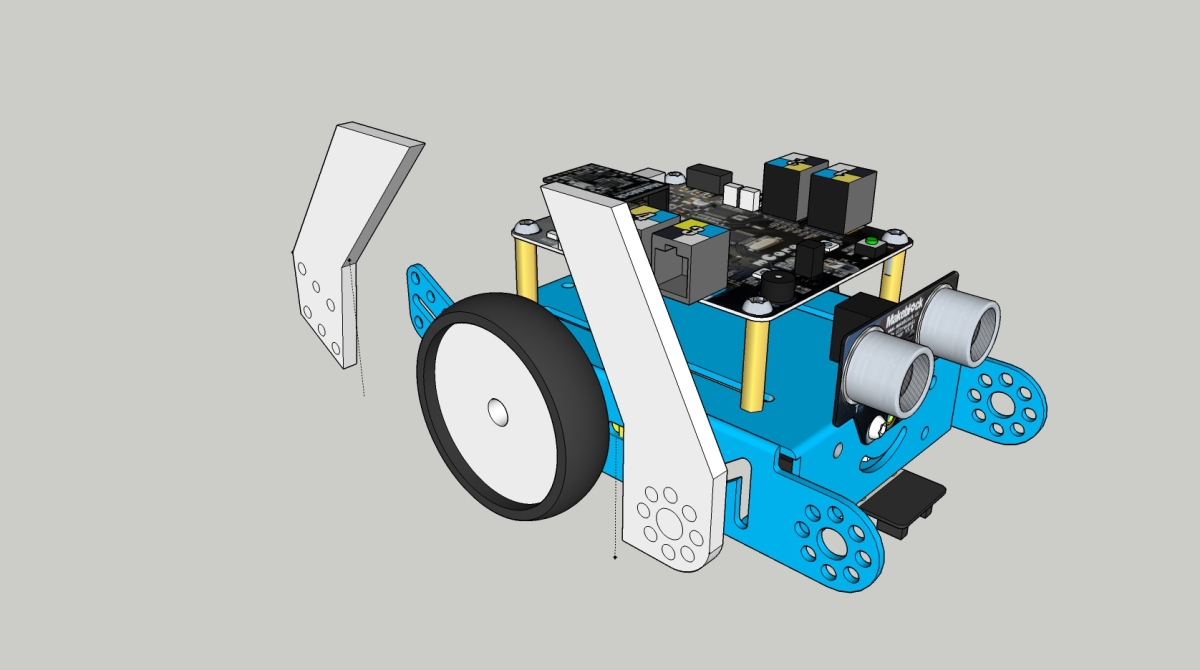
Fichier de simulation pour une fixation des pattes sur l'extérieur du robot.
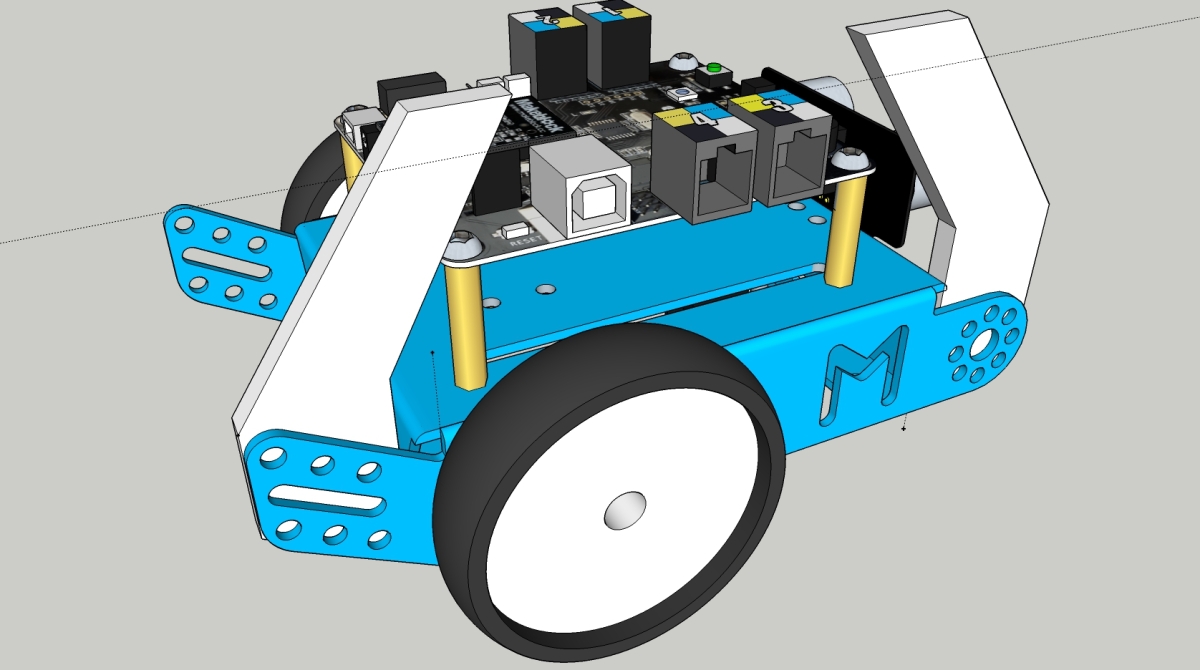
Fichier de simulation pour une fixation des pattes à l'intérieur du robot.
Vous pouvez aussi importer dans la représentation 3D du robot les pattes du support réalisées.

Ouvrir la représentation en 3D du robot
Dans le menu "fichier" choisir "importer"
Sélection votre représentation 3D des pattes du support
Faire la mise en place des pattes sur le robot
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
Importer et placer une deuxième fois la représentation 3D des pattes du support.
Valider votre solution en vérifiant la mise en place.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
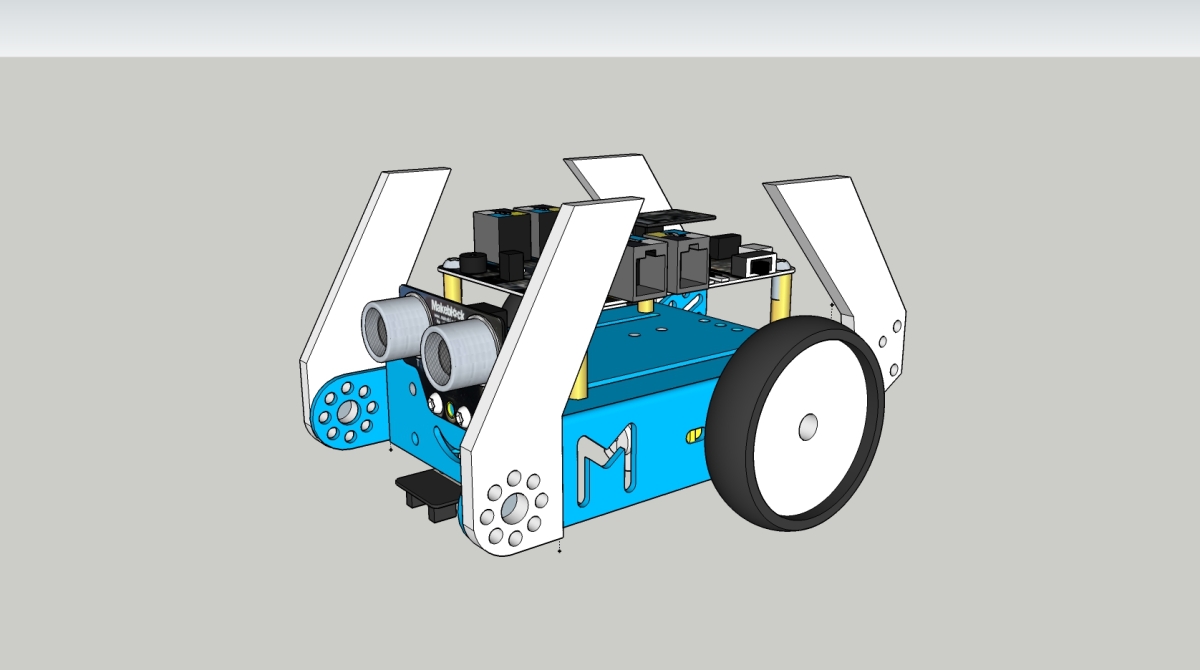
Contrôler si la mise en place des pattes réalisées est possible.
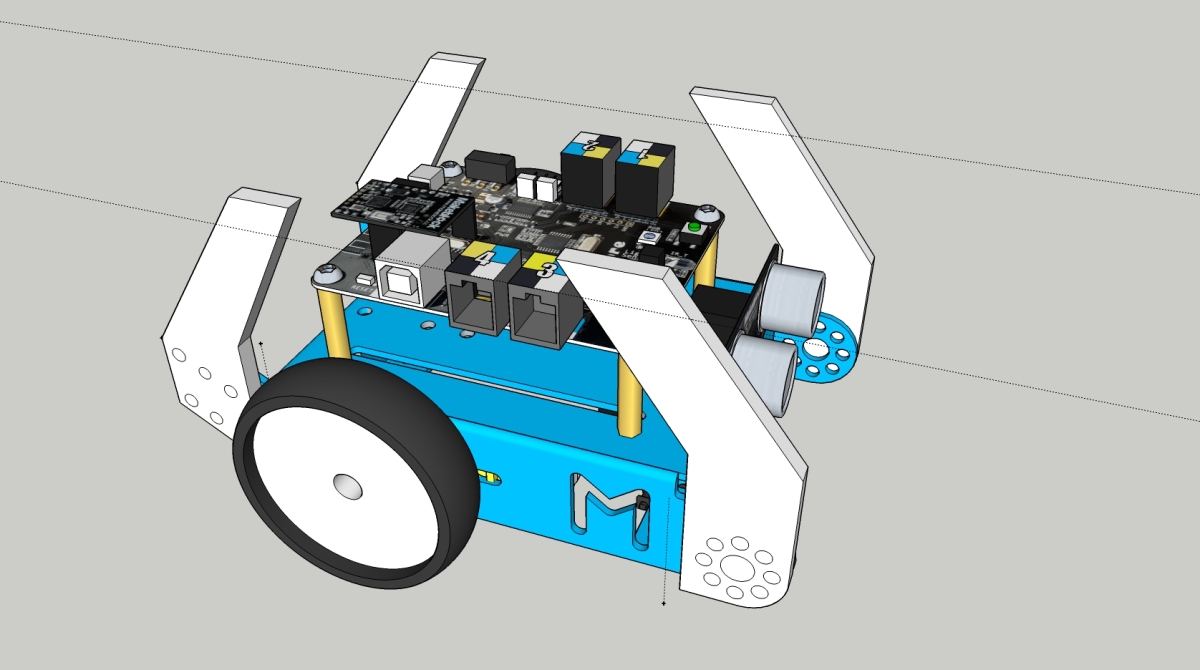
On aperçoit dans la démonstration ci-dessus que la forme des pattes n'est pas possible pour une fixation sur les cotés intérieurs du robot. Elle est possible sur les cotés extérieurs.
A vous de contrôler si les formes des pattes que vous avez conçu permettent une fixation convenable sur le robot.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.