Utilisation du logiciel mBlock
Le logiciel mBlock est basé sur l'utilisation du logiciel Scratch
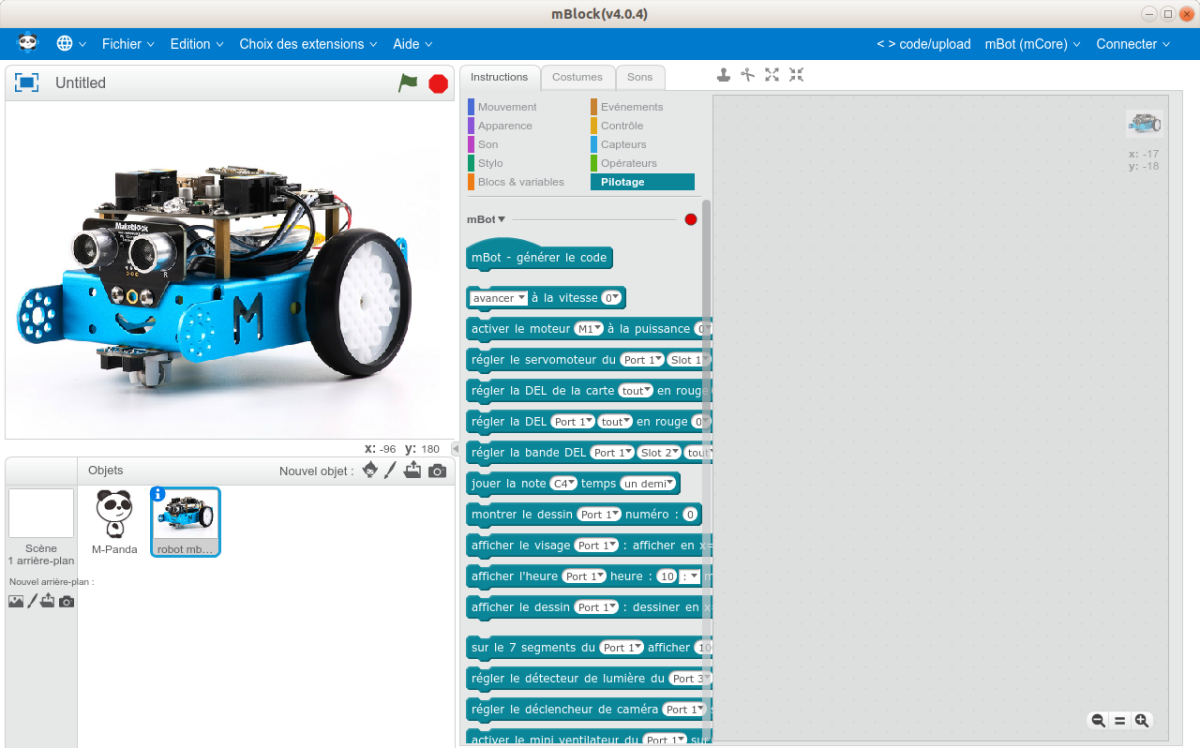
Les instructions de pilotage du robot
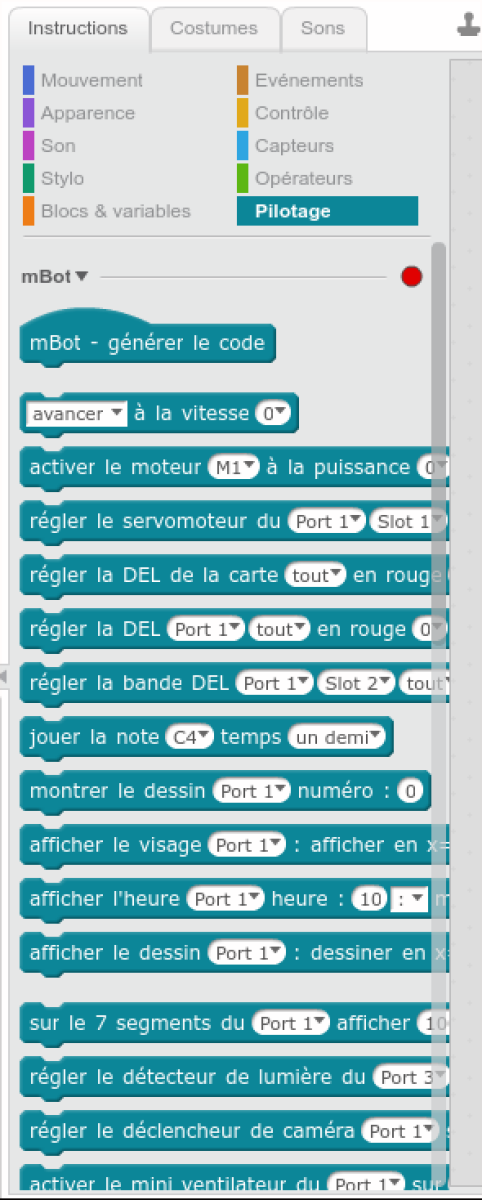
Cliquer sur pilotage dans le menu instruction
Les instructions de contrôle

Les instructions de contrôle permettent de réaliser une attente, des répétitions et des conditions.
Générer le programme
Cette instruction sera mise à chaque début de programme. En double cliquant dessus, le code sera généré automatiquement.
Transférer le programme
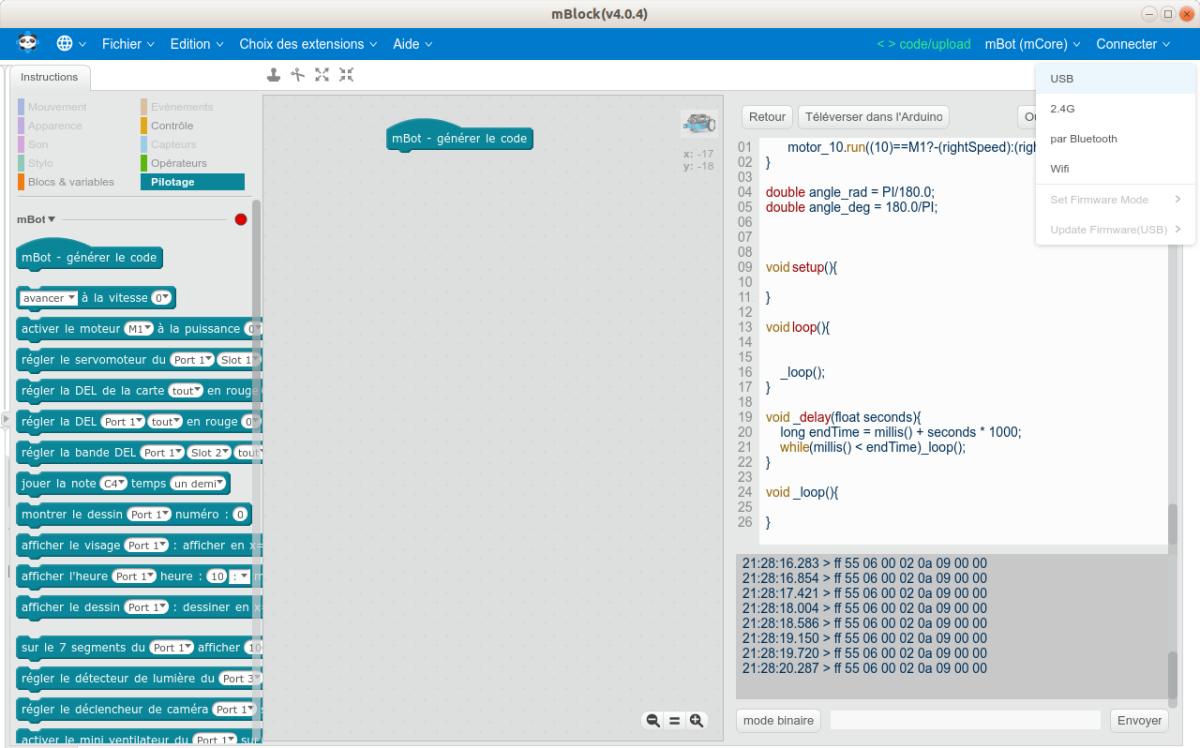
Connecter le câble sur le port USB de l'ordinateur
Connecter le câble sur le robot
Cliquer sur le menu connecter et choisir "USB"
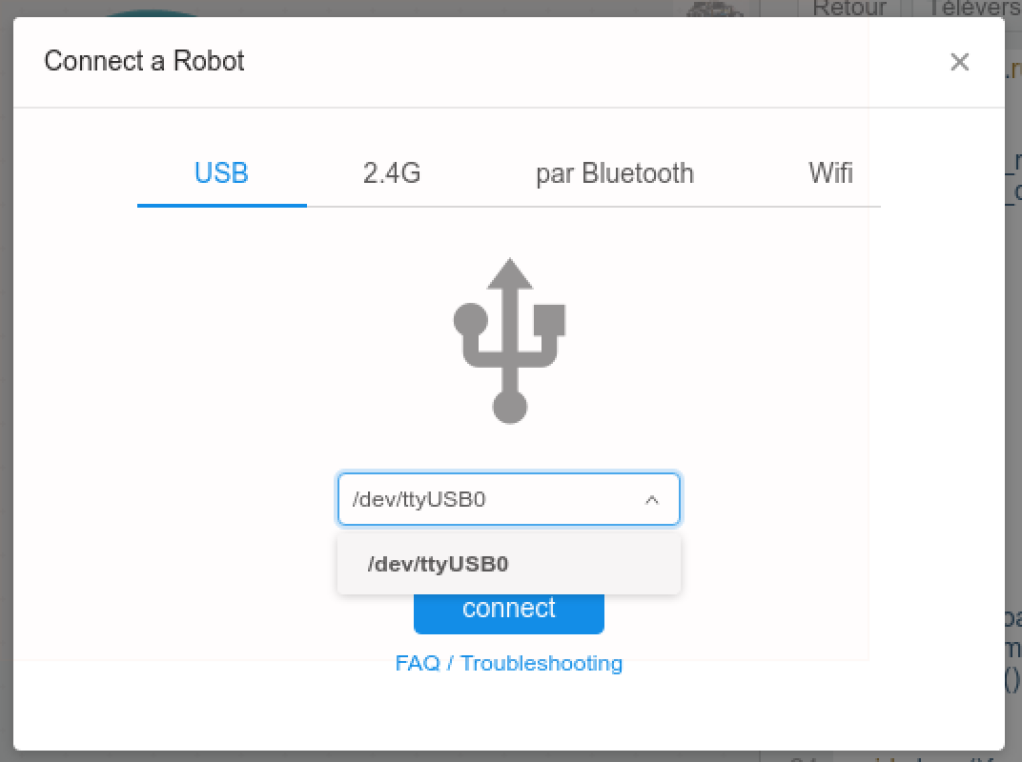
Mettre sous tension le robot avec l'interrupteur marche/arrêt
Le port USB connecter doit s'afficher ou il faut le sélectionner
Cliquer sur "connect"
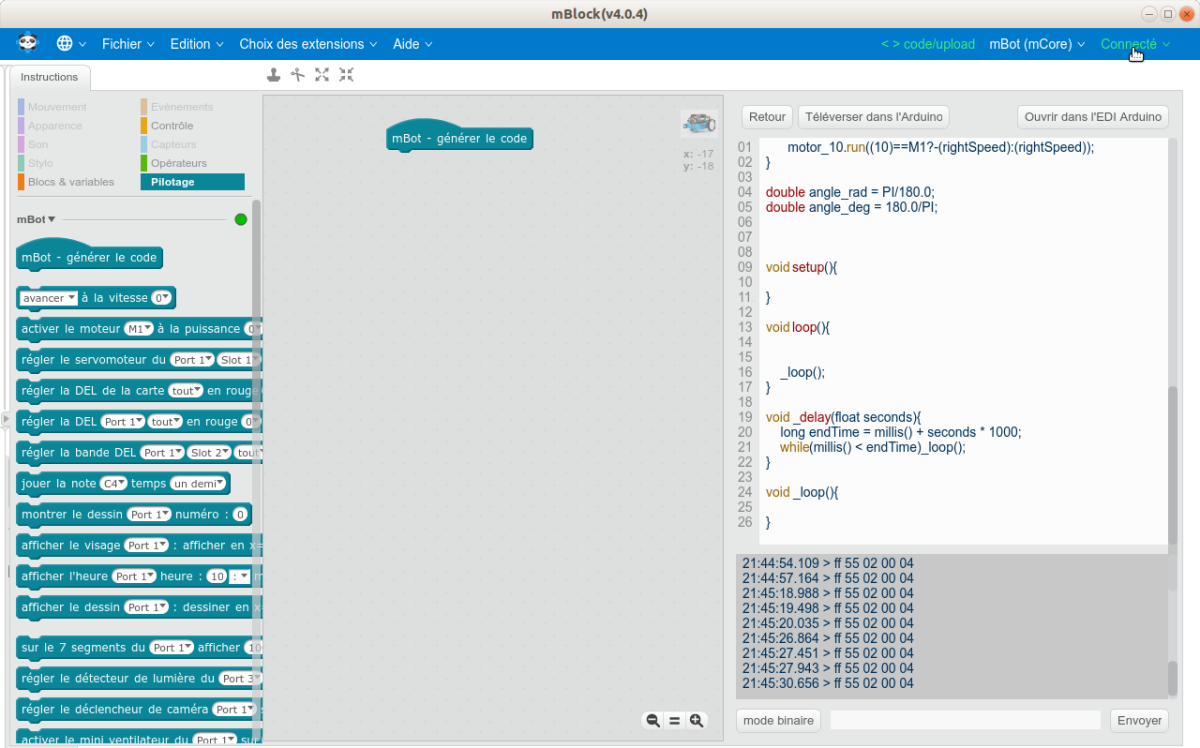
En haut à gauche le menu indique connecté
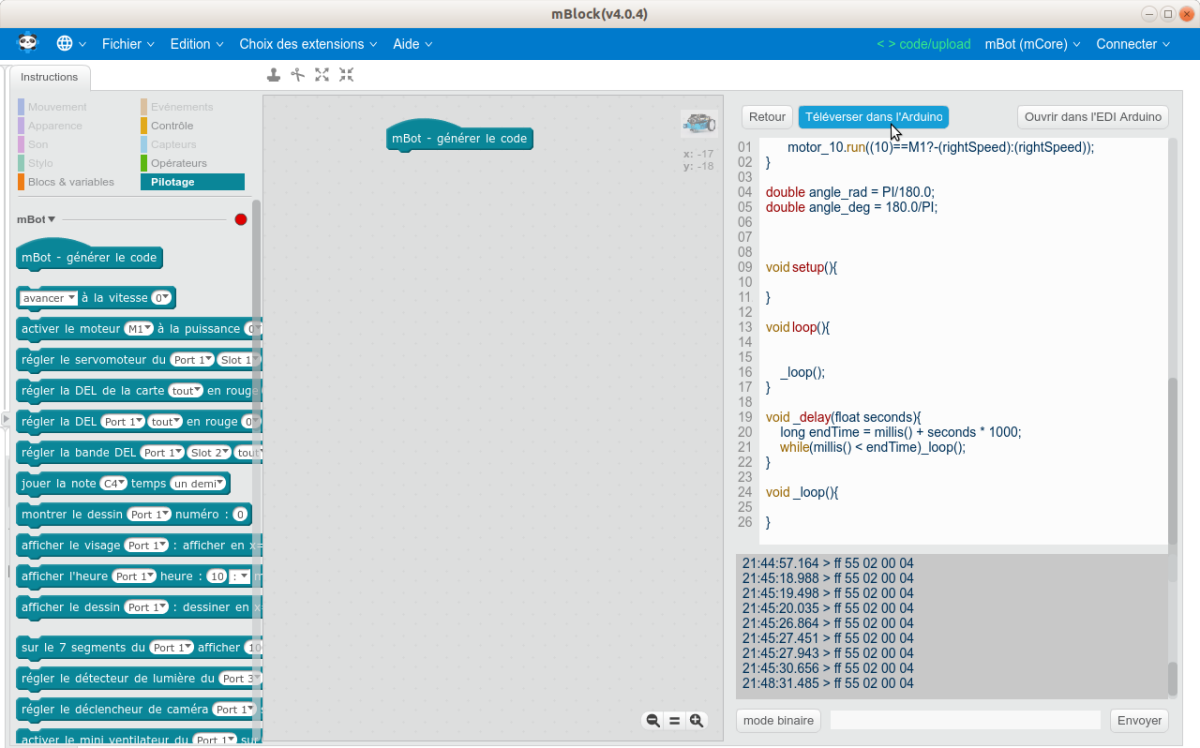
Pour transférer le programme dans le robot, cliquer sur "Téléverser dans l'Arduino"
Le pilotage des moteurs
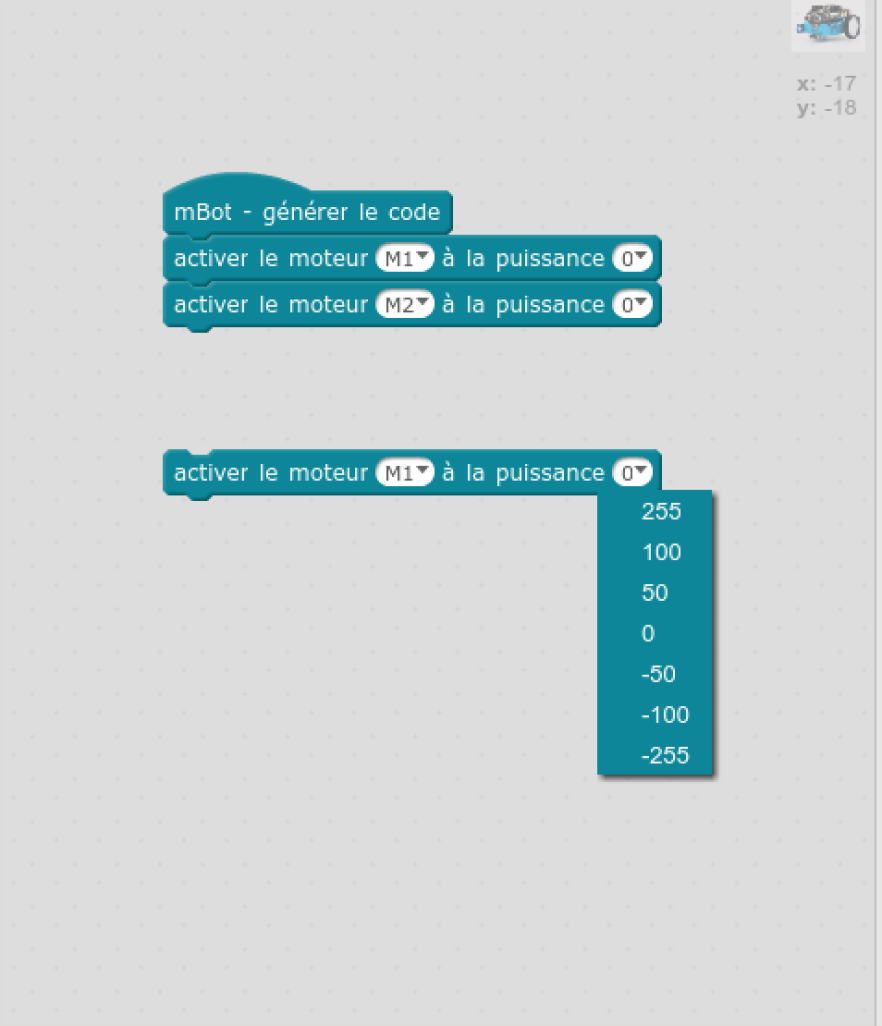
On utilisera ces deux commandes pour stopper et activer les 2 moteurs droit et gauche appelés dans le programme M1 et M2
puissance à 255 vitesse maximum en marche avant
puissance à 0 le moteur est stoppé
Puissance à -255 vitesse maximum en marche arrière
La structure alternative "si alors"

La condition "si alors" permet de tester une condition avant de faire une action.
Pour le robot, on pourra commander une action des moteurs suivant l'état de capteur optique infrarouge :
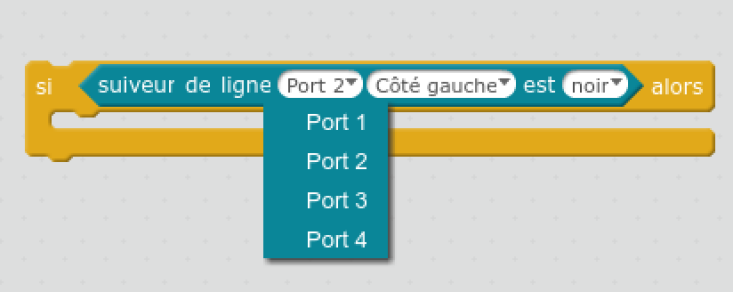
Il faudra sélectionner le port sur le quel est branché le capteur (normalement le port 2)
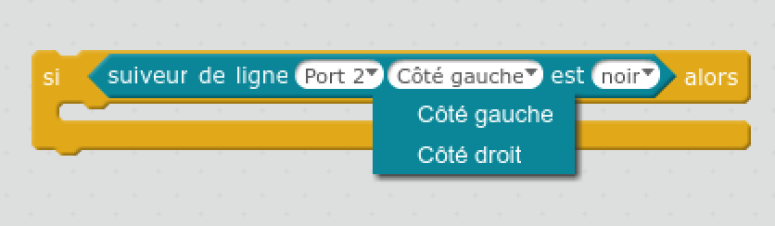
Il faudra sélectionner le coté droit ou gauche du capteur à tester
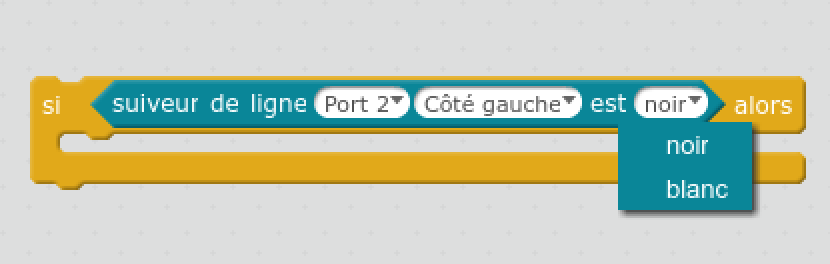
Ensuite il faudra choisir l'état du capteur (détection du noir ou du blanc)