Programmer un capteur ultrasons
Mesure de la distance : création d'une variable
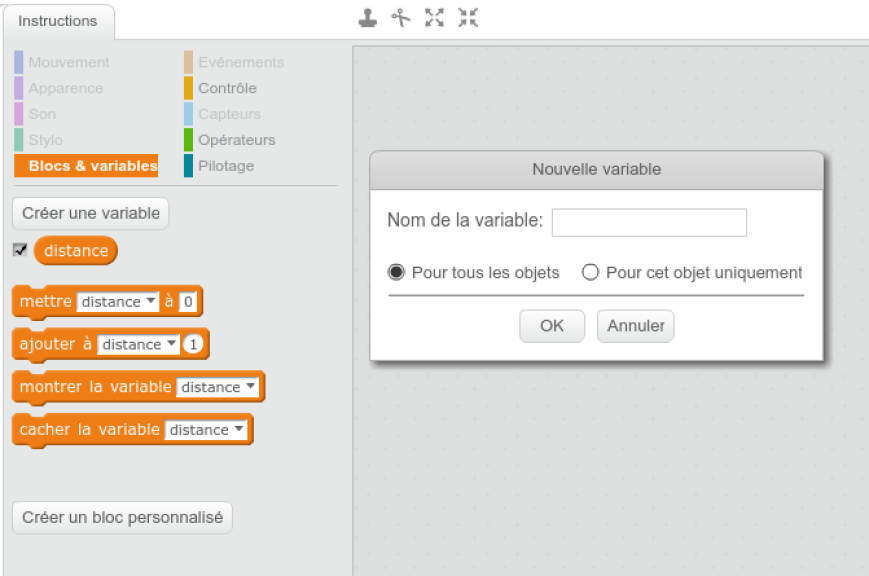
Le capteur à ultrasons est capable de mesurer une distance entre le robot et l'obstacle. Il faut donc créer une variable appelée "distance" dans le logiciel mBlock
Associer la variable "distance" à la distance mesurée par le capteur ultrasons
Dans les instructions "blocs et variable "et "pilotage" associer "mettre à distance" et distance mesurée par le capteur ultrasons

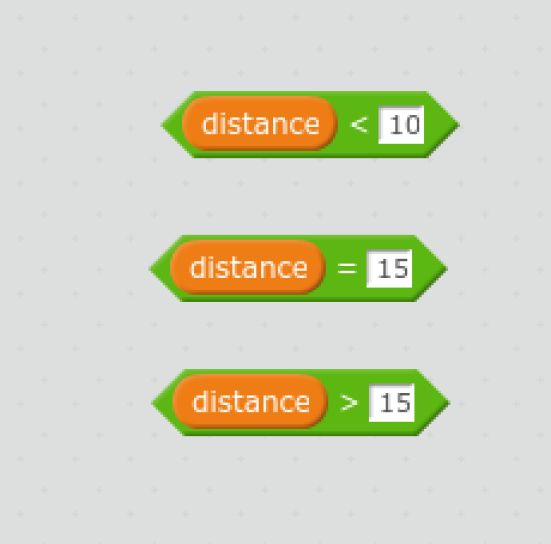
Associer à la variable "distance" un opérateur "égale, inférieur, supérieur"
Vous pouvez associer les instructions "blocs & variables" et "opérateurs"
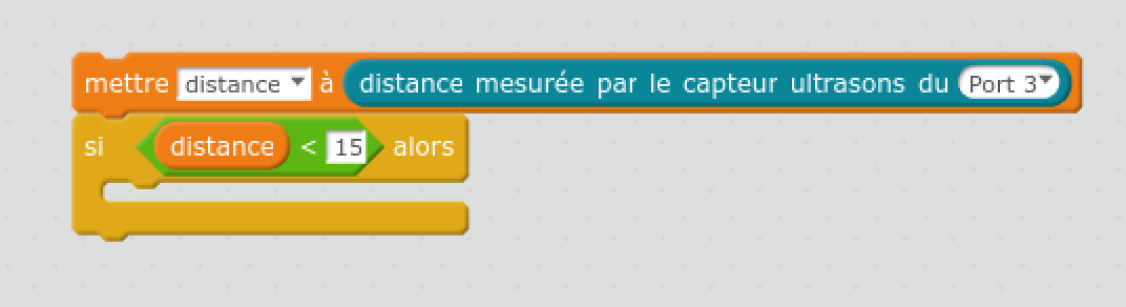
Exemple : Associer une distance mesurée à une condition "si alors"
Exemple d'une condition si le capteur à ultrasons détecte un obstacle à une distance inférieur à de 15cm